 Driver
Driver Controllor
Controllor Driver&Contr
Driver&Contr
RC51步进电机控制器/定长功能说明书
 |


 该种控制器另有四种版本可选:
该种控制器另有四种版本可选:
一、概述
Rc51步进电机控制器采用高速单片机,具有操作简单,安装方便,可靠性好等特点。 与驱动器、步进电机可以组成一套自动控制系统,可用于工位控制,和一些特殊要求 的一维定长控制。
二、技术指标
1.长度、速度、次数可以设置
2.最高输出频率:20 KPPS(脉冲/秒)
;最低频率:60HZ
3.可接受外接信号控制
4.可控制外部其它部件工作
5.数码显示,可显示当前的运行状态、循环次数、脉冲数等
6.采用超高速单片机控制,采用共阳接法,可直接驱动我厂生产的RC系列步进电机驱动器
7.输出信号可驱动24V固态继电器(加二极管可驱动24V非固态继电器),控制电磁阀需要加继电器。
三、控制器的显示及操作键
1.面板说明:
5位数码管显示,3按键设置参数,用作参数设置
2.接线说明:
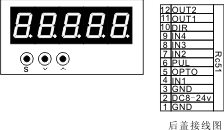 |
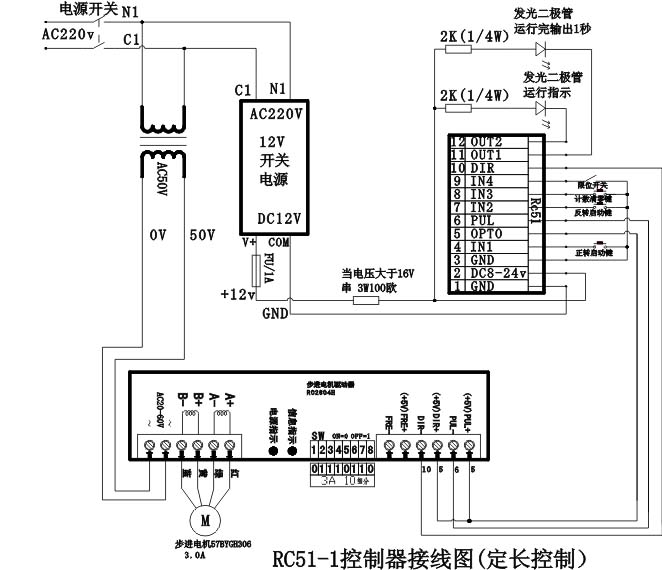
见控制器后盖接线图,具体连线见系统电气图 1、2脚为电源输入端,电压范围:DC8-24V(0.3A) 标准12V 3脚为GND,输入输出信号公共端 4、7、8、9脚为输入端,可接外部输入信号 5OPTO、6PUL、10DIR为步进电机控制线 此三端分别连至驱动器的OPTO,PUL(CP),DIR OPTO为公共阳端,PUL为脉冲信号,DIR为方向信号 11、12脚为输出信号端
 |
四、控制器的操作说明
1.上电控制器为停止状态,显示0或断电前的计数值,
2.按s键显示‘SPEED',再按s键循环显示‘Long’>‘count’>‘HANd’>‘SPEED’>
在此状态下按向下键进入设置状态,按向下键退出进入停止状态.
‘SPEED'速度设置,按向下键进入设置(62-20000脉冲/秒),向上键加,向下键减,s键确认退出
‘Long’长度设置,方法同速度设置,(0-65530脉冲)当设置0时为不计长度一直转
‘count’次数设置,(0-65530次),0表示不计数一直运行,其他则是计到设置数进入停止状态,
需要清零才可以继续运行
‘HANd’手动调试步进电机,按向下键电机正转,向上键电机反转,按s键退出
3.内部参数设置,同时按住向上和s键显示‘ACC’按s键循环显示‘HSPEd’>‘dzcL’
‘ACC’加速曲线(1-5),5电机加速度最快,负载大选小些。
‘HSPEd’手动速度设置(62-10000脉冲/秒),在‘HANd’状态下手动运行电机的转速频率。
‘dzcL’电子齿轮设置(0.0001-2.0000),电子齿轮为1个脉冲的长度,角度或圈数,
长度:假定电机1圈脉冲N=400,行程L=5毫米,则dzcL=L/N=0.0125,‘Long’单位毫米
角度:假定电机1圈脉冲N=1000,角度L=360度,则dzcL=L/N=0.3600,‘Long’单位度
长度:假定电机1圈脉冲N=2000,行程L=1圈,则dzcL=L/N=0.0005,‘Long’单位圈数
4.运行:
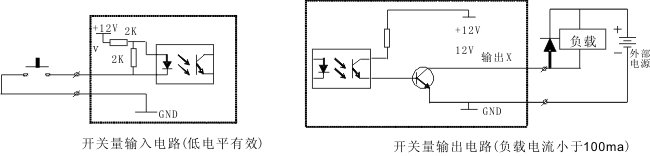
控制器的参数都设置好后,当控制器的外接信号输入端IN1有信号时进入运行状态,此时输出端OUT2输出,即三极管信号(OUT2可以接固态继电器,固态继电器的电压范围很宽,5V也可驱动,所以不用加二极管--加二极管可直接接24V继电器,电磁阀,气缸等外部设备), 正转(如果外接输入IN2有信号则电机为反转),走完设置的长度或者遇到IN4信号(IN4信号可以接限位信号,或继电器信号等)停止,工作次数加1,OUT2停止输出,停止的同时输出OUT1(可以接切刀,气缸等信号)输出1秒,再有IN1信号后再次运行,到设置的工作次数后, 需要清零才可以继续运行。
5.输入信号口可以接光电接近开关,接NPN常开型,接近开关的电源正负端分别接2脚和1脚,接近开关的信号脚接控制器的输入端,如IN1端--4脚
五、控制器断电
控制器带断电记忆功能,参数设置好后自动记忆保存,断电后当前的工作次数记忆。
六、接线示意图
 |
步进电机相关参数说明
1. 步进电机的步距角
一般两相步进电机步距角为1.8度,即在驱动器设置为 1 细分的状态下,控制器每发一个脉冲到驱动器,电机转过1.8度,这样,步进电机转过360度,一共需要200个脉冲。
驱动器的细分技术,就是将步距角分的更细,比如 2 细分状态下,步距角变为 1.8 ÷2 = 0.9度 ,控制器每发一个脉冲到驱动器,电机转过0.9度,这样,步进电机转过360度,一共需要(200× 2)= 400个脉冲。又比如 4 细分状态,步距角为1.8÷4 = 0.45度,电机转一圈需要800个脉冲,其他细分依次类推,即 步距角 = 1.8 ÷ 细分数 (度)
2. 步进电机的速度
步进电机的速度与控制器给到驱动器的脉冲频率相关。对应于上面描述的 2 细分状态下,电机转一圈需要 400 个脉冲,这时,如果控制器给到驱动器的脉冲频率为 400Hz,则电机的速度为: 400 ÷ 400 = 1 (圈/秒) ,电机转过这一圈只需要1秒
如果控制器的脉冲频率为800Hz,则电机速度为 800÷400 =2 (圈/秒)
所以,电机的速度计算公式为:
V = 脉冲频率÷(细分数× 200) (圈/秒)
3. 电子齿轮的计算
电子齿轮为1个脉冲对应的长度,角度或圈数,当dzcL=1.0000时单位为脉冲数
长度:假定电机1圈脉冲N=400,行程L=5毫米,则dzcL=L/N=0.0125,‘Long’单位毫米
角度:假定电机1圈脉冲N=1000,角度L=360度,则dzcL=L/N=0.3600,‘Long’单位度
圈数:假定电机1圈脉冲N=2000,行程L=1圈,则dzcL=L/N=0.0005,‘Long’单位圈数
如果机械单位需要精确到0.1圈,可以将dzcL放大10倍,即dzcL=0.0050,当圈数设置
101时,实际的圈数为10.1圈。